CUESTIONES PREVIAS
Contesta a las cuestiones sin ayudarte de internet y con pocas palabras.
Debate por pares sobre las respuestas dadas y finalmente debate en el grupo clase y analizad entre todos las respuestas.
Para responder a las cuestiones siguientes en la tarea de Moodle.
|
|
INTRODUCCIÓN
La robótica es la rama de la ingeniería mecánica, de la ingeniería electrónica y de las ciencias de la computación, que se ocupa del diseño, construcción, operación, estructura, manufactura y aplicación de los robots.
Máquina vs Autómata vs Robot

Máquina
Una máquina es capaz de realizar un trabajo dirigido por un usuario.

Autómata
Un autómata es capaz de realizar el trabajo sencillo y repetitivo que le mandan sin necesidad de supervisión.

Robot
Un robot es capaz de decidir cuál es el trabajo que debe hacer.
Sistemas de Control
De lazo abierto
Los autómatas responden a un sistema de control de lazo abierto en el que el controlador no tiene en cuenta el estado de la salida.
- Los elementos que lo integran son:
- Señal de entyada: Señal fijada en el sistema de control
- Controlador: Dispositivos encargados de controlar el proceso
- Actuador: Dispositivos que realizan el proceso
- Perturbaciones: Señales no deseadas que afectan al funcionamiento del sistema
- Salida: Señal que controla el sistema
- Un sistema de control en lazo abierto puede ser un sistema de regadio de una jardinera, que no controle la humedad de la tierra de la jardinera
De lazo cerrado
Los robots responden a un sistema de control de lazo cerrado, en el que el funcionamiento depende de la salida, un comparador le dice al controlador si tiene que actuar o no.
- Los elementos que lo integran son:
- Señal de entrada: Señal de referencia fijada
- Comparador: Dispositivo que compara la señal de referencia fijada con la señal medida de salida a controlar
- Controlador: Dispositivo encargado de controlar el proceso
- Actuador: Dispositivo mecánico encargador de realizar laoperación del proceso
- Sensor: Dispositivo encargado de medir la señal de salida para realimentarla y compararla con la señal de referencia
- Perturbaciones: Señales no deseadas que afectan al funcionamiento del proceso
- Sus características más representativas son:
- La salida se realimenta y compara con la entrada afectando a la señal de control del sistema
- Sistemas más estables ante las perturbaciones que afectan al proceso
- Tienen realimentación de la salida con respecto a la entrada
- Un sistema típico en lazo cerrado puede ser un sistema de riego que controle la humedad de la tierra de la jardinera y produzca el riego, cuando la humedad esté por debajo de un valor fijado como señal de referencia


Amplía la información visitando:
▷ Lazo Abierto y Lazo Cerrado – [Sistemas de Control ] (controlautomaticoeducacion.com)
Definición de Robótica
El término «Robótica» fue acuñado por Isaac Asimov para describir la tecnología de los robots. Él mismo predijo hace años el aumento de una poderosa industria robótica, predicción que ya se ha hecho realidad. Recientemente se ha producido una explosión en el desarrollo y uso industrial de los robots tal que se ha llegado al punto de hablar de «revolución de los robots» y «era de los robots».
Podemos definir el significado de la robótica como una ciencia que aglutina varias ramas tecnológicas (como la mecánica, la electrónica, la informática, la inteligencia artificial y la ingeniería de control, entre otras), con el objetivo de diseñar máquinas que sean capaces de realizar tareas automatizadas o de simular el comportamiento humano o animal, en función de la capacidad de su software.
Los principales objetivos de la robótica son abaratar los costes de producción y realizar tareas tediosas o peligrosas, y aunque hasta hace pocos años, únicamente los veíamos en el sector industrial automatizando puestos de trabajo, ahora también disfrutamos de los robots en hoteles, bares, bancos, consultas médicas, ejerciendo de policías o en catástrofes naturales.

Definición de Robot
La palabra «robot» proviene del término checo «robota», que significa «esclavo». El término fue usado por primera vez en 1921 en la obra de teatro R.U.R. (Rossum’s Universal Robots) del checo Karel Capek. La obra trata sobre una fábrica que produce «hombres artificiales» llamados robots, criaturas que apenas piensan por sí mismas y parecen felices de trabajar para otros, el conflicto planteado es si los robots están siendo explotados o no y las consecuencias que esto podría traer.
En 1979, el “Robot Institute of America” define un a un robot como: «Un manipulador reprogramable y multifuncional diseñado para trasladar materiales, piezas, herramientas o aparatos específicos a través de una serie de movimientos programados para llevar a cabo una variedad de tareas»
En la actualidad, se recurre más a la siguiente definición:
Un robot es una máquina automática programable que es capaz de interpretar información del medio físico para modificar su conducta. Tiene la capacidad de interactuar con el entorno y en función de ello, realizar unas funciones u otras.
Historia
Primer robot de la historia
El robot Elektro fue presentado al público general en 1936. Es conocido como el primer robot de la historia.
Era un robot con forma humana, medía 2 metros y pesaba 120 kilos.
Era capaz de andar y pronunciar hasta 700 palabras.
1970: Unimation produce los PUMA
1973: Aparece el primer robot controlado por un mini-ordenador
1976: El robot de la NASA “Vinking II” aterriza en Marte
1986: HONDA, la empresa Japonesa inicia un proyecto para construir un robot humanoide
1997: HONDA presenta P3 un enorme robot humanoide
1999: SONY lanza «Aibo» un perro-robot
2003: Aquel robot humanoide de SONY, Qrio, se convierte en el primer humanoide comercial completamente autónomo capaz de correr
Actividades 1. Definiciones, robótica, sistemas.
Responde a las siguientes preguntas en Moodle, copiando los enunciados completos:
¿Qué es capaz de hacer un robot que no puede hacer una máquina?
Explica la diferencia entre un sistema de lazo abierto y un sistema de lazo cerrado, mediante un ejemplo distinto al del riego.
¿Cómo podemos definir la robótica?
¿Cuáles son los objetivos que se pretenden conseguir mediante la robótica?
¿De dónde viene la palabra robot?
¿Qué es un robot?
CLASIFICACIÓN DE LOS ROBOTS
Por Cronología
Veremos los tipos de robot que han surgido a lo largo de la historia, desde los años 50 hasta la actualidad:
Primera Generación (Manipuladores): Esta primera etapa se puede considerar desde los años 50 ,en donde las máquinas diseñadas cuentan con un sistema de control relativamente sencillo de lazo abierto, esto significa que no existe retroalimentación alguna por parte de algún sensor y realizan tareas previamente programadas que se ejecutan secuencialmente.
Segunda Generación (Robots de Aprendizaje): La segunda etapa se desarrolla hasta los años 80, este tipo de robots son un poco mas conscientes de su entorno que su previa generación, disponiendo de sistemas de control de lazo cerrado en donde por medio de sensores adquieren información de su entorno y obtienen la capacidad de actuar o adaptarse según los datos analizados. También pueden aprender y memorizar la secuencia de movimientos deseados mediante el seguimiento de los movimientos de un operador humano, es decir, el robot lo sigue y lo memoriza.
Tercera Generación (Robots con Control Sensorizado): Durante esta etapa, que tiene lugar durante los años 90, los robots ahora cuentan con controladores (computadoras) que usando los datos o la información obtenida de sensores, obtienen la habilidad de ejecutar las ordenes de un programa escrito en alguno de los lenguajes de programación que surgen a raíz de la necesidad de introducir las instrucciones deseadas en dichas maquinas. Los robots usan control del tipo lazo cerrado, lo cual significa que ahora son bastante conscientes de su entorno y pueden adaptarse al mismo.
Cuarta Generación (Robots Inteligentes): Esta generación se caracteriza por tener sensores mucho mas sofisticados que mandan información al controlador y la analizan mediante estrategias complejas de control. Debido a la nueva tecnología y estrategias utilizadas estos robots califican como «inteligentes», se adaptan y aprenden de su entorno utilizando «conocimiento difuso» , «redes neuronales», y otros métodos de análisis y obtención de datos para así mejorar el desempeño general del sistema en tiempo real, donde ahora el robot puede basar sus acciones en información mas solida y confiable, y no solo esto sino que también se pueden dar la tarea de supervisar el ambiente que les rodea, mediante la incorporación de conceptos «modélicos» que les permite actuar a situaciones determinadas.
Quinta Generación: La siguiente generación será una nueva tecnología que incorporara 100% inteligencia artificial y utilizara métodos como modelos de conducta y una nueva arquitectura de subsunción, además de otras tecnologías actualmente en desarrollo como la nanotecnología. Esta etapa depende totalmente de la nueva generación de jóvenes interesados en robótica, una nueva era de robots nos espera.XºXºº
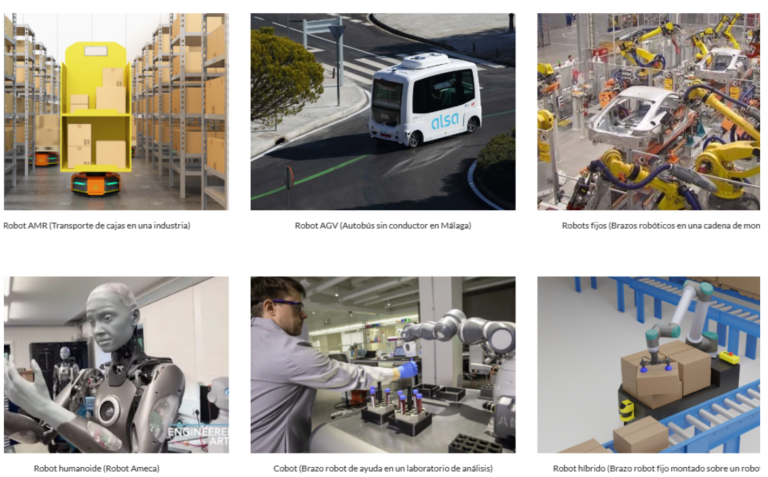
Por Área de Trabajo
Según el área donde trabaje un robot, se pueden clasificar en:
-
Robots móviles autónomos (AMR): Se mueven y toman decisiones sobre la marcha gracias a sus sensores y cámaras.
-
Vehículos de guiado automático (AGV): Se mueven siguiendo pistas o recorridos predefinidos.
-
Robots fijos: Realizan su trabajo dentro de su área de alcance.
-
Humanoides: Tienen forma de personas o animales.
-
Cobots (Robots colaborativos): Están diseñados para funcionar junto a los humanos o directamente con ellos.
-
Híbridos: Son robots obtenidos de la combinación de los distintos tipos de robots, para poder realizar tareas más complejas.
Por Utilidad
Existen muchos tipos de robots que son útiles a todo tipo de industrias para mejorar los resultados y reducir la carga de los empleados para que estos puedan concentrarse en las tareas más valiosas y esenciales:
Industria: La industria manufacturera lleva mucho tiempo a la vanguardia del uso de diversos tipos de robots para lograr resultados empresariales. Los AMR, los AGV, los robots articulados y los cobots han sido todos implementados en las plantas de producción y los almacenes para ayudar a agilizar los procesos, impulsar la eficiencia y promover la seguridad, a menudo en conjunto con los controladores lógicos programables. Son utilizados en una gran variedad de aplicaciones, como la soldadura, el montaje, el transporte de materiales y la seguridad en los almacenes.
Agricultura y ganadería: Los AMR ayudan a que los agricultores puedan cosechar sus cultivos de forma más rápida y eficiente, y para ello utilizan impresionantes capacidades de inteligencia. Los robots agrícolas pueden evaluar la madurez, mover cualquier rama o retirar las hojas del camino, además de recolectar los cultivos de forma precisa y delicada para evitar cualquier daño al producto.
Asistencia sanitaria: En el sector sanitario se utilizan varios tipos de robots para mejorar la experiencia de los pacientes. Los AMR se utilizan para repartir los medicinas y desinfectar superficies, o bien ofrecer funciones de telepresencia móviles. Los Cobots también se utilizan para ayudar a los profesionales médicos durante la rehabilitación o para ayudar a las enfermeras a prestar mejor servicio a sus pacientes.
Logística: La robótica ayuda a las empresas de logística y transporte marítimo a entregar sus mercancías de forma más rápida y eficiente. Utilizan tanto AMR y AGV como robots de almacén para ayudarles a procesar artículos, acelerar las operaciones y mejorar la precisión. También utilizan AMR para que se encarguen del último kilómetro en el proceso de entrega y garanticen así la seguridad de los envíos.
Comercio y hostelería: La robótica puede utilizarse para mejorar la experiencia de los clientes o huéspedes de muchas maneras distintas. Las empresas de venta minorista o de hostelería utilizan la robótica para automatizar los procesos de inventario, ofrecer servicios de atención y orientación, limpiar diversos entornos y ayudar a los clientes con su equipaje o bien a aparcar.
Ciudades inteligentes: La robótica ayuda a crear ciudades más inteligentes y seguras. Los robots humanoides ofrecen servicios de orientación e información. Los AMR se utilizan para la entrega de productos y como patrullas de seguridad rutinarias. La robótica puede también ayudar a agilizar la construcción de edificios, realizar estudios sobre el terreno, y a recopilar información sobre el modelado de los edificios.

Leyes de la Robótica
Últimamente estamos asistiendo a un gran avance en las aplicaciones de la Inteligencia Artificial. En un futuro próximo se aplicará la Inteligencia Artificial a los robots humanoides para que parezcan personas.
¿Crees que los robots se volverán en el futuro tan inteligentes que se revelen contra las personas que les obligan a trabajar y a realizar actividades peligrosas?
Este es un tema recurrente en las obras del escritor y profesor de química ruso (luego nacionalizado estadounidense) Isaac Asimov (1920 – 1992).
En 1942 Isaac Asimov enunció en su libro Círculo Vicioso las tres leyes fundamentales de la robótica en las que basaría su universo literario:
Un robot no hará daño a un ser humano o, por inacción, permitirá que un ser humano sufra daño.
Un robot debe obedecer las órdenes dadas por los seres humanos excepto si estas órdenes entrasen en conflicto con la 1ª ley.
Un robot debe proteger su propia existencia en la medida en que esta protección no entre en conflicto con la 1ª o la 2ª Ley.
Aunque los expertos afirman que aún estamos muy lejos de un tipo de inteligencia artificial que permita a los robots aprender y tomar decisiones de manera autónoma, el futuro está al alcance de la mano. Máquinas como los vehículos autónomos, los drones o los robots asistenciales o para uso médico se están introduciendo en el mercado y en nuestras vidas sin una legislación pertinente.
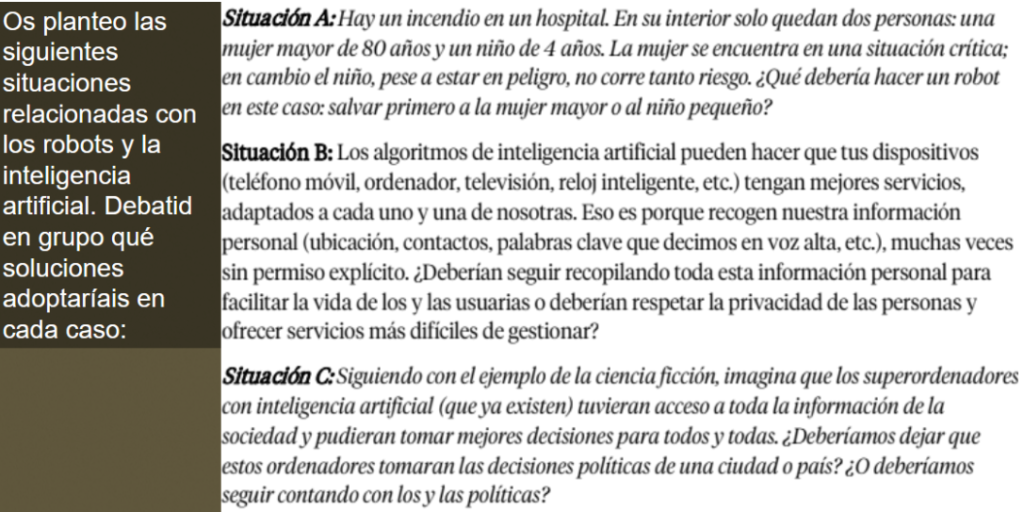
Actividad
Debate u anota, durante 5 minutos y en pequeños grupos sobre:
¿Cómo podrían mejorarse?
¿Siguen el orden correcto?
¿Son justas y seguras?
Debate en grupo clase.
Influencia de las leyes de la robótica en la actualidad
El Parlamento de la Unión Europea se inspiró en las leyes de Asimov, para empezar a discutir una legislación que regule la IA.
La Unión Europea trabaja para legislar el mundo que nos rodea y regular nuestro futuro, para ello propone seis leyes que normalicen la convivencia con los robots. Todavía no son definitivas, ya que está normativa tiene que pasar por el filtro de la Comisión Europea, pero su principal objetivo es reducir el impacto que supondrán la implantación en la sociedad de estas máquinas, ya que uno de los mayores efectos será la pérdida de trabajo.
1. Los robots deberán tener un interruptor de emergencia
Lo primero que tenemos que controlar es cualquier situación que se pueda dar de peligro. La evolución que están teniendo estas máquinas hace que la Inteligencia Artificial pueda aprender debido al entrenamiento, por lo que cualquier situación de peligro que se pueda producir debe ser evitada con un interruptor de emergencia.
2. Los robots no podrán hacer daño a los seres humanos
Obviamente, está fundamentada en la principal Ley de Asimov y completa la primera propuesta por la Unión Europea. La robótica siempre tiene que ser pensada para ayudar y proteger a los humanos, por lo que no se permitirá la creación de máquinas cuyos fines sean destruir o dañar a las personas.
3. No podrán generarse relaciones emocionales con los robots
¿Habéis visto “El hombre bicentenario”? En ella, un robot interpretado por Robin Williams permanece colaborando con la misma familia durante décadas, dando como resultado estrechas relaciones personales entre las máquinas y las personas. Si no la habéis visto no seré yo quien os haga spoiler, pero estos vínculos emocionales son la trama central de todo el film. Pues bien, la Unión Europea considera que esto no debe ser así, por lo que prohibirá crear cualquier relación emocional con los robots. El objetivo de esta norma es recordar a los humanos que las inteligencias artificiales no son capaces de sentir amor por nosotros, por lo que nosotros no debemos actuar diferente.
4. Los que sean más grandes deberán tener un seguro obligatorio
No todas las máquinas serán iguales ni tendrán las mismas características. Tampoco podrán realizar todos las mismas actividades. Es evidente que algunos de ellos tendrán más riesgo de causar ciertos daños materiales que otros robots.
Por ello, la Unión Europea obligará a los dueños de los robots de mayor tamaño, que son considerados los que más riesgo tienen de provocar daños en el entorno, la contratación de un seguro obligatorio como podría suceder con los autos. Así, cualquier desperfecto podrá ser arreglado sin complicaciones.
5. Derechos y obligaciones para los robots
¿Cómo serán llamados ante las administraciones públicas? Parece que “Personas electrónicas” es el nombre escogido para su clasificación legal. Siempre que se utilice la palabra “persona” implica que existirán una serie de derechos que de otra manera ni se pensarían. El debate se encuentra en cuáles serán sus derechos u obligaciones, pero según todo lo que estamos viendo, serán los robots los que asumirán las consecuencias de sus actos junto a sus propietarios o creadores.
6. Tendrán la obligación de pagar impuestos
Principalmente, se utilizarán para reducir el impacto de los robots en el empleo humano. Su entrada en el mercado laboral obligará a muchas empresas a despedir a sus empleados, ya que los robots realizarán el mismo trabajo a un precio menor. Por ello, el Parlamento Europeo considera necesario que las máquinas tributen en la seguridad social, para poder subvencionar las ayudas que se darán a estas personas que han sido despedidas.
Componentes de un Robot

Sensores
Tipos de Sensores
Existen diferentes tipos de sensores, en función del tipo de variable que tengan que medir o detectar:
De contacto.
Ópticos.
Térmicos.
De humedad.
Magnéticos.
De infrarrojos.

Efectores o Actuadores


Mecanismos de Manipulación y Locomoción
Manipulación: capacidad de actuar sobre objetos, modificándolos o trasladándolos.
Locomoción: facultad de desplazarse. Robots móviles.
