Control Remoto de un RobotCar con mBlock 2.0.

Control Remoto de un RobotCar
Este código es una versión del proyecto «RobotCar controlado con los cursores del ordenador», pero en este caso vamos a usar un mando a distancia para que se mueva.
El código que os adjunto sería para la placa » Motor Driver Controlador 2 motores HG7881″ , que sería la que tiene el robot que usaré para este proyecto
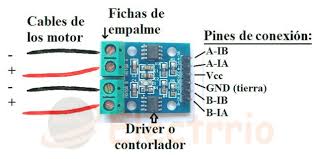

Las conexiones para los motores A y B, se hacen con pines PWM . En el código que os adjunto tenéis que saber
B – IA – Avance del motor B — Pin PWM – 10
B – IB – Retroceso del motor B — Pin PWM – 9
B – IB – Retroceso del motor B — Pin PWM – 9
A – IA – Avance del motor A — Pin PWM – 6
A – IB – Retroceso del motor A — Pin PWM – 5
CÓDIGO para mBlock basado en Scratch 2.0.

El código de los bloques que hemos creado es el siguiente

Evidencias de la puesta en práctica en el aula:
Proyecto – Distintas formas de controlar un RobotCar
Otros proyectos:
Siguelíneas con mBlock 2.0.
Evita Obstáculos con mBlock 2.0.
Control del RobotCar con Realidad Aumentada usando mBlock 2.0.
Jingle Bells con mBlock 2.0.
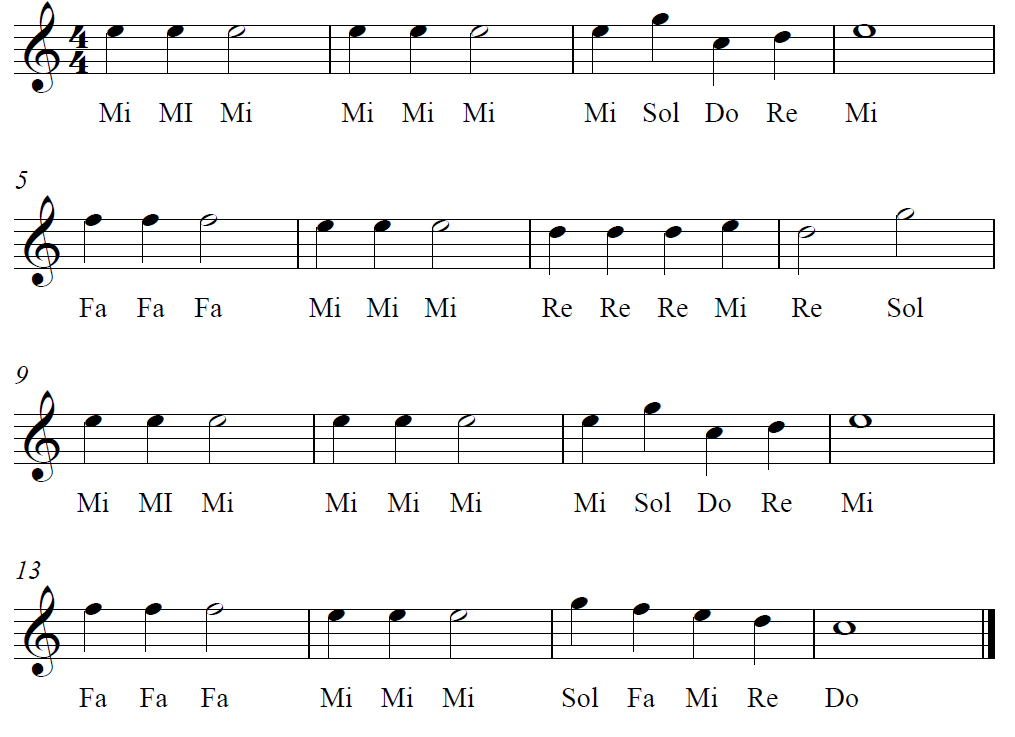
En este post vamos a interpretar el villancico Jingle Bells con mBlock 2.0. , aquí está el resultado
¿Cómo lo hemos hecho?
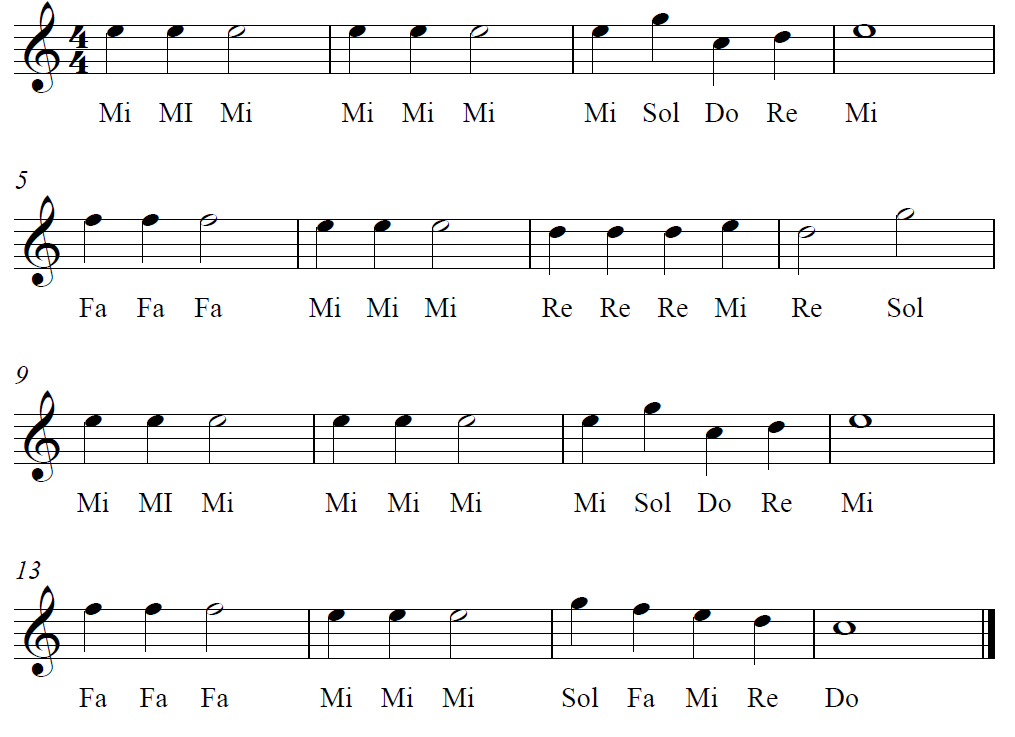
Hemos cogido esta partitura del villancico
mBlock usa el cifrado americano que para la Escala de Do sería
Nomenclatura latina: Do Re Mi Fa Sol La Si Do
Cifrado Americano: C D E F G A B C
Cifrado Americano: C D E F G A B C
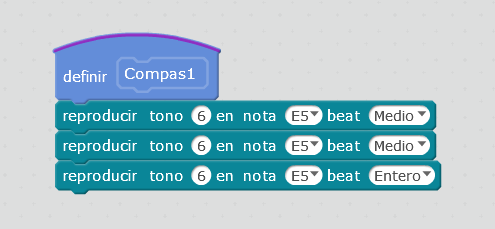
En nuestra partitura usamos la quinta octava y para facilitar la programación hemos creado un bloque para cada compás y nos ha quedado un programa así de simple
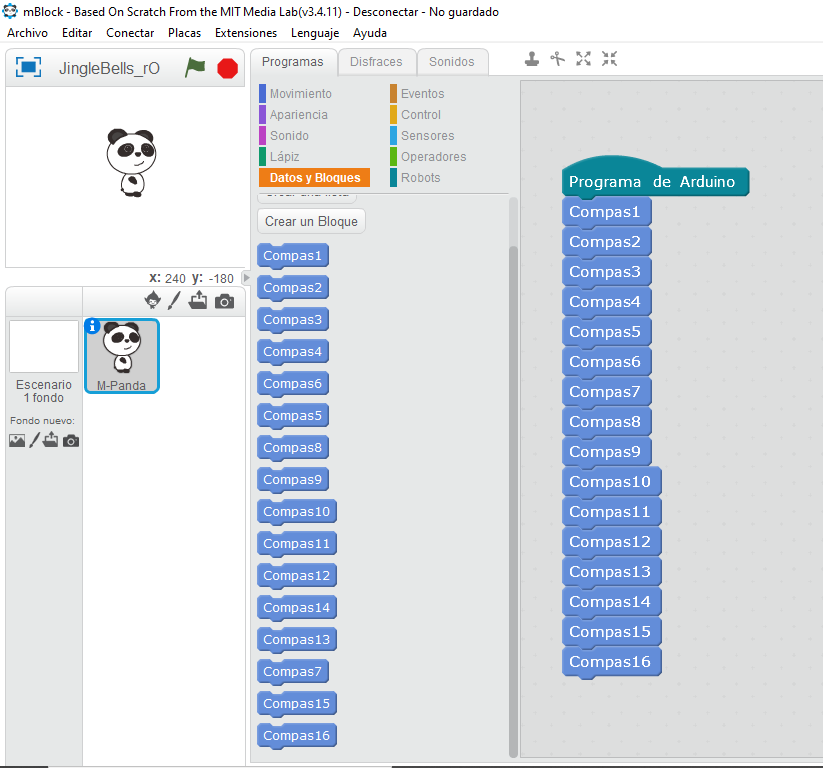
Os muestro como programamos el primer compás

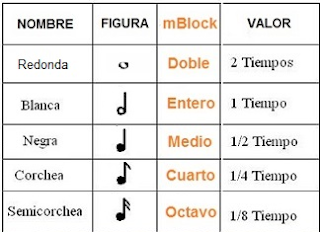
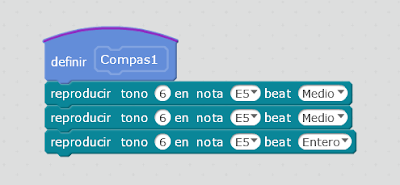

teniendo en cuenta que la duración de una redonda en mBlock es de dos tiempos y para la duración de cada figura podemos usar la tabla
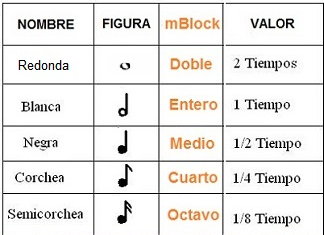
y nos quedaría así
Otros proyectos:
Jingle Bells con Scratch 3.0.
Proyecto – Distintas formas de controlar un Robot

Con este proyecto quiero conseguir que mis alumnos de 1º E.S.O. de la optativa «Scratch y la Robótica», apliquen algunas de las cosillas que han aprendido con Scratch 3.0. durante estos meses e introducirlos en la Robótica de una forma divertida, y con una metodología activa en la que aprendan haciendo.

Para la Electrónica Digital y la Robótica, usaremos mBlock 2.0. que está basado en Scratch 2.0. y es muy parecido al entorno con el que han trabajado.
La mayor parte del proyecto se desarrollará en modo Scratch y usaremos los Robots creados en el centro que usan para controlar los motores la placa » Motor Driver Controlador 2 motores HG7881″.
Como este proyecto nos va a servir para introducirnos en la Robótica, sin desvincularnos de la programación con Scratch y partiendo de la base que los alumnos no tienen conocimientos de lo que es una placa de arduino, pines, motores cc, sensores … he creado estas variables y bloques de programación
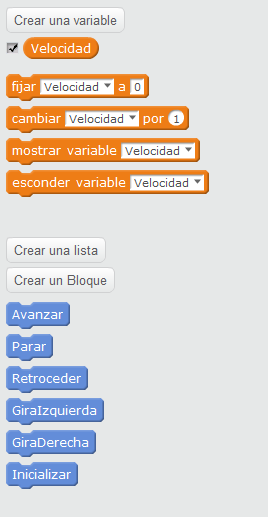
con los que podrán mover nuestro robot sin necesidad de tener todos esos conocimientos y similares a los que usan otros robots que existen en el mercado, como mBot.
Para desarrollar el proyecto he planificado las siguientes actividades:
- Actividad 1 : Mover el panda de mBlock con los cursores del ordenador.
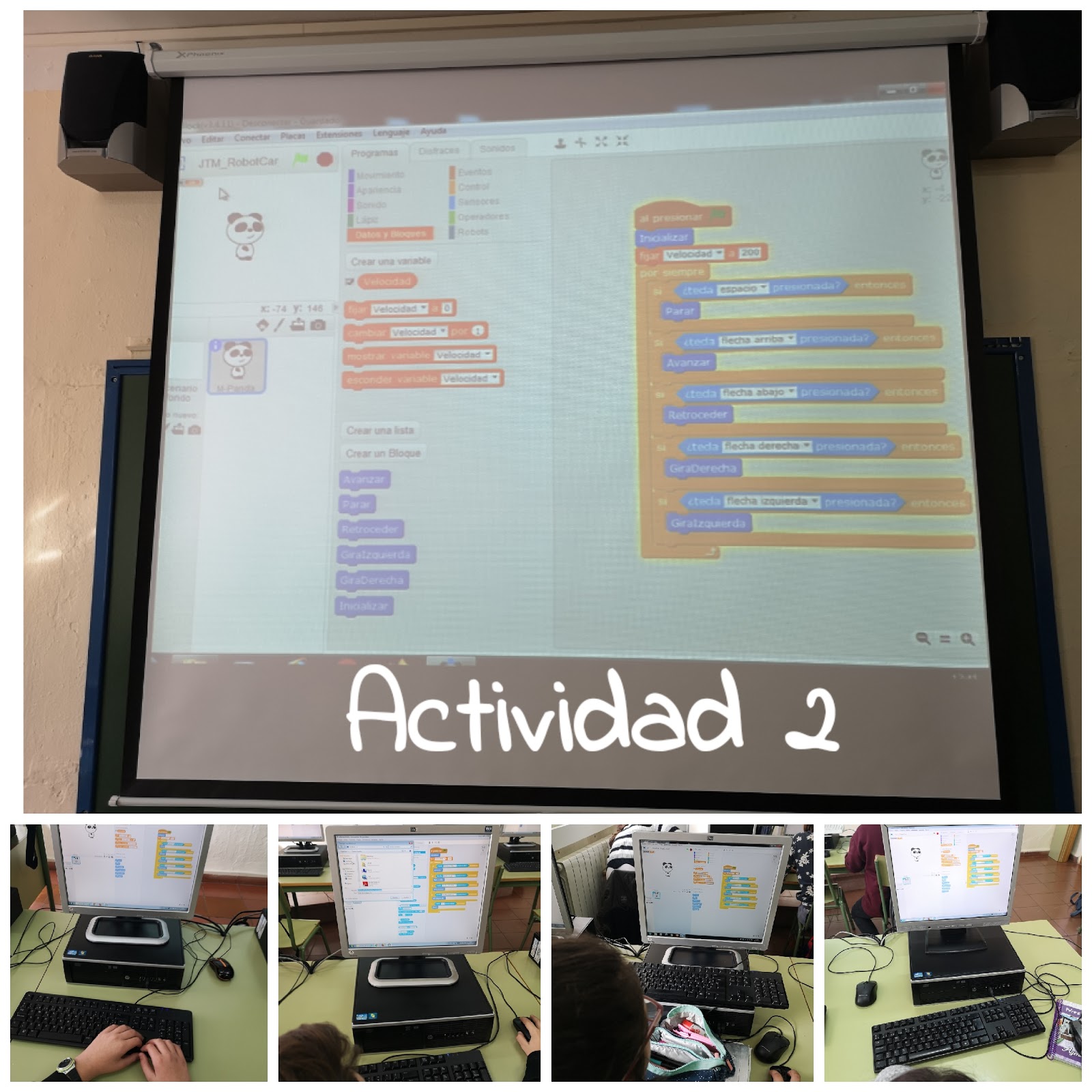
- Actividad 2 : Mover nuestro Robot con los cursores del ordenador.
- Actividad 3 : Mover nuestro Robot con un mando a distancia.
- Actividad 4 : Mover el panda de mBlock usando las placas Makey-Makey.
- Actividad 5 : Mover nuestro Robot usando las placas Makey-Makey.
- Actividad 6 : Mover el panda de mBlock con Realidad Aumentada.
- Actividad 7 : Mover nuestro Robot con Realidad Aumentada.
Evidencias de la puesta en práctica del proyecto en el aula:
Actividad 1.
Actividad 2.
Actividad 3.
Actividad 4.
Actividad 5.
Actividad 6.
Actividad 7.
Otros proyectos:
Control de un RobotCar con los cursores del ordenador
Control Remoto de un RobotCar
Siguelíneas con mBlock 2.0.
Evita Obstáculos con mBlock 2.0.
Control del RobotCar con la Realidad Aumentada – mBlock 2.0.
Control del RobotCar con la Realidad Aumentada – mBlock 2.0.
Este código es una versión del proyecto «RobotCar controlado con los cursores del ordenador», pero en este caso vamos a usar el sensor de vídeo de nuestro ordenador y crear unos cursores virtuales que tocándolos con nuestras manos harán que nuestro coche se mueva.
Sólo añadiré que estos códigos son lo más básico que se me ha ocurrido, que se pueden mejorar, y que están preparados para que se puedan usar con alumnos de primaria y primer ciclo de la ESO.
El código que os adjunto sería para la placa » Motor Driver Controlador 2 motores HG7881″ , que sería la que tiene este robot





Las conexiones para los motores A y B, se hacen con pines PWM . En el código que os adjunto tenéis que saber
B – IA – Avance del motor B — Pin PWM – 10
B – IB – Retroceso del motor B — Pin PWM – 9
B – IB – Retroceso del motor B — Pin PWM – 9
A – IA – Avance del motor A — Pin PWM – 6
A – IB – Retroceso del motor A — Pin PWM – 5
CÓDIGO para mBlock basado en Scratch 2.0.
La estructura de este código cambia un poco, ahora tenemos que codificar cada una de las flechas y botones que aparecen en la pantalla: botón parar, flecha derecha, flecha izquierda, flecha hacia arriba (avanzar) y flecha hacia abajo (retroceder). Vamos al lío
¡¡OJO!! En cada uno de los sprites tengo que definir los bloques que usemos.
Este código sería para el escenario

Girar hacia la izquierda

Avanzar

Retroceder

Girar hacia la derecha

¡¡ OJO !! Cuando termines, no te olvides de pulsar la tecla espacio para
apagar la cámara de tu ordenador.
En mi caso como aún no tengo el módulo bluetooth en mi robot, tengo que hacerlo con el robot conectado por el USB, pero aún así es una pasada ver como interacciona Scratch, Realidad Aumentada y Robótica. Aquí tenéis el vídeo.
Otros proyectos:
Siguelíneas con mBlock 2.0.
Evita Obstáculos con mBlock 2.0.
Control del RobotCar con un mando a distancia usando mBlock 2.0.
Proyecto – Distintas formas de controlar un RobotCar
Siguelíneas con mBlock 2.0.
Evita Obstáculos con mBlock 2.0.
Control del RobotCar con un mando a distancia usando mBlock 2.0.
Proyecto – Distintas formas de controlar un RobotCar