El aluminio es uno de los metales más abundantes del planeta, razón entre otras por las que se utiliza tanto en la fabricación de envases, lo cual causa que haya tantas latas de aluminio en el mundo.
El aluminio es uno de los metales más abundantes del planeta, razón entre otras por las que se utiliza tanto en la fabricación de envases, lo cual causa que haya tantas latas de aluminio en el mundo.
Afortunadamente se han desarrollado técnicas de reciclaje para evitar que este tipo de envase se convierta en un problema para el planeta, y una característica muy importante de este sistema de reciclaje es que no es necesario que la lata esté en su forma original, sino que también se puede reciclar ya compactada. Es por eso que hemos creado un compactador de latas, con el fin de poder comprimir gran número de latas en mucho menor espacio y así hacer más simple la tarea de trasladar los envases al contenedor amarillo de reciclaje, aparte de que también, al ocupar menos volumen cada lata se ahorra en bolsas de plástico, lo que supone un claro beneficio ecológico.
Para ver con perspectiva la utilidad de este proyecto se ha de mencionar que una bolsa de basura promedio tiene suficiente tamaño para 84 latas a su volumen normal, mientras que estando comprimidas este número aumenta 5 veces, es decir que la misma bolsa de basura pasa de poder llevar 84 latas a 422 latas. Lo cual significa un ahorro energético y de recursos porque de lo que hubiera necesitado 5 bolsas para tirar requiere solo una en su lugar. La misma lógica es aplicable también a los camiones de reciclaje, que para grandes cantidades de envases necesitarán realizar menos viajes y gasto de combustible, reduciendo así la huella de carbono.
Desde el IES Los Colegiales de Antequera, nos propusimos realizar un proyecto de COMPACTADORA DE LATAS DE REFRESCO, que aplicara los saberes adquiridos en las distintas unidades didácticas de las asignaturas de Tecnología Industrial y Programación y Computación de 2º de Bachillerato, para contribuir a un objetivo común: la mejora en la conservación del medio ambiente.
Así, se han aplicado los conceptos y técnicas estudiadas en bloques temáticos tan distintos como:
- Neumática y Electroneumática.
- Sistemas de Control Programado y Robótica.
- Diseño e Impresión en 3D.
- Dibujo Técnico.
Puedes ver el funcionamiento del proyecto en este vídeo.
A continuación se añade la documentación generada por el proyecto en sus distintas disciplinas.
NEUMÁTICA Y ELECTRONEUMÁTICA:
Se ha diseñado un circuito neumático con cuatro cilindros de doble efecto, para implementar una secuencia de dosificación, compactación y expulsión de latas de refresco tamaño estándar de 33cl.
Cada uno de los cilindros tiene la siguiente misión:
- Cilindro 1 (primer dosificador): sostiene la penúltima lata almacenada en el dosificador mientras se procesa la última.
- Cilindro 2 (segundo dosificador): sostiene la última lata y la libera cuando vaya a ser procesada.
- Cilindro 3 (compactador): se trata de un cilindro de mayor calibre, dotado de un cabezal aplastador diseñado e impreso en 3D, que se ocupará de compactar las latas.
- Cilindro 4 (trampilla): se ocupa de abrir o cerrar la trampilla que expulsa las latas una vez compactadas. Dispone también de una pieza impresa en 3D para unir el vástago del cilindro con la trampilla propiamente dicha.
Cada cilindro es gobernado por una válvula electroneumática 5/2 (de 5 vías y 2 posiciones). A continuación puedes ver el esquema del circuito.
Circuito electroneumático compactador de latas
SISTEMAS DE CONTROL PROGRAMADO Y ROBÓTICA:
Para controlar las electroválvulas se ha utilizado un módulo de relés de cuatro unidades, que es gobernado por una placa Arduino UNO.
La secuencia se crea mediante un programa elaborado con el IDE de Arduino, que puedes ver a continuación.
int DOS1=2;
int DOS2=3;
int COMP=4;
int TRAM=5; //Creamos una variable por cada cilindro a controlar
int boton=6; //y otra para el pulsador
void setup() {
for(int i=2;i<6;i++) pinMode(i,OUTPUT); //Establecemos los pines 2 a 6 como salidas
pinMode(6,INPUT_PULLUP); //y el pin 6 como entrada con resistencia de pullup
digitalWrite(DOS1,LOW);
digitalWrite(DOS2,HIGH);
digitalWrite(COMP,LOW);
digitalWrite(TRAM,HIGH); //Posicionamos los cilindros para la carga
}
void loop() {
if(digitalRead(boton)==false) //Comprobamos si el botón está pulsado
//Si está pulsado se inicia la rutina de funcionamiento del compactador
{
digitalWrite(DOS1,HIGH); //Sujetamos la penúltima lata
delay(500); //Mantenemos la posición medio segundo
digitalWrite(DOS2,LOW); //Lanzamos la última lata
delay(1000); //Mantenemos la posición un segundo
digitalWrite(COMP,HIGH); //Compactamos la lata
delay(2000); //Mantenemos la posición dos segundos
digitalWrite(DOS2,HIGH); //Preparamos el dosificador 2 para la carga
digitalWrite(COMP,LOW); //Recogemos el compactador
digitalWrite(TRAM,LOW); //Expulsamos la lata compactada
delay(2000); //Mantenemos la posición dos segundos
digitalWrite(TRAM,HIGH); //Cerramos la trampilla
delay(1000); //Mantenemos la posición un segundo
digitalWrite(DOS1,LOW); //Descargamos lata al último compartimento
delay(500); //Mantenemos la posición un segundo
}
}
DISEÑO E IMPRESIÓN EN 3D:
Para implementar el proyecto ha sido necesario fabricar varias piezas de manera específica, y hemos utilizado para ello la aplicación Google Sketchup para el diseño y la aplicación Cura para generar los archivos «gcode» que finalmente han sido impresos en las imresoras Ender 3 y Ender 6 disponibles en el centro.
Las piezas que se han impreso han sido:
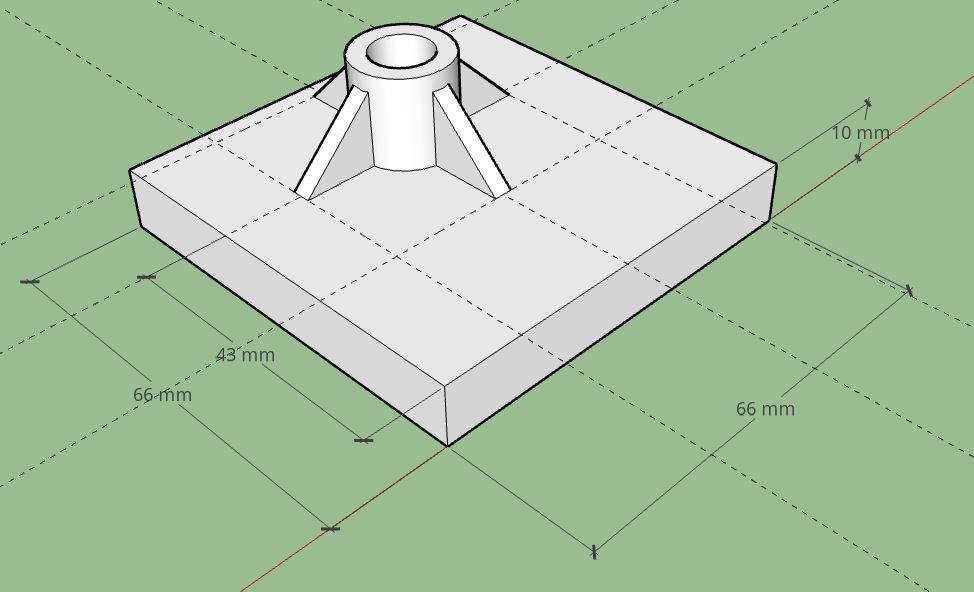
- Soporte para el cilindro compactador. Todo el sistema ha sido montado sobre un panel de montaje rápido para circuitos neumáticos. Los cilindros disponen de un soporte de anclaje rápido sobre el panel, pero para el compactador hubo que adquirir un cilindro de mayor calibre para el cual no había soporte, por lo cual nos vimos en la necesidad de diseñarlo e imprimirlo por nuestros medios.

- Cabezal del aplastador. Se ha diseñado e impreso una pieza que acopla sobre el vástago del cilindro compactador.
- Trampilla. Para acoplar la trampilla con el vástago del cilindro correspondiente hemos diseñado e impreso también una pieza específica.

DIBUJO TÉCNICO:
Algunas de las piezas se han fabricado con tableros de madera. Los planos generados son los siguientes: Planos Proyecto