Laberinto con canica, controlado con servomotores y Arduino
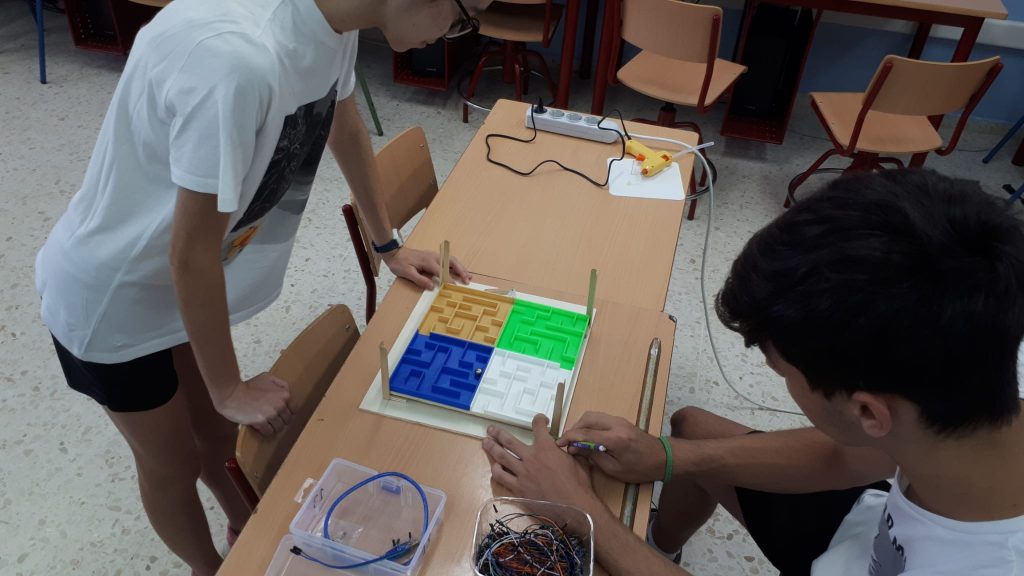
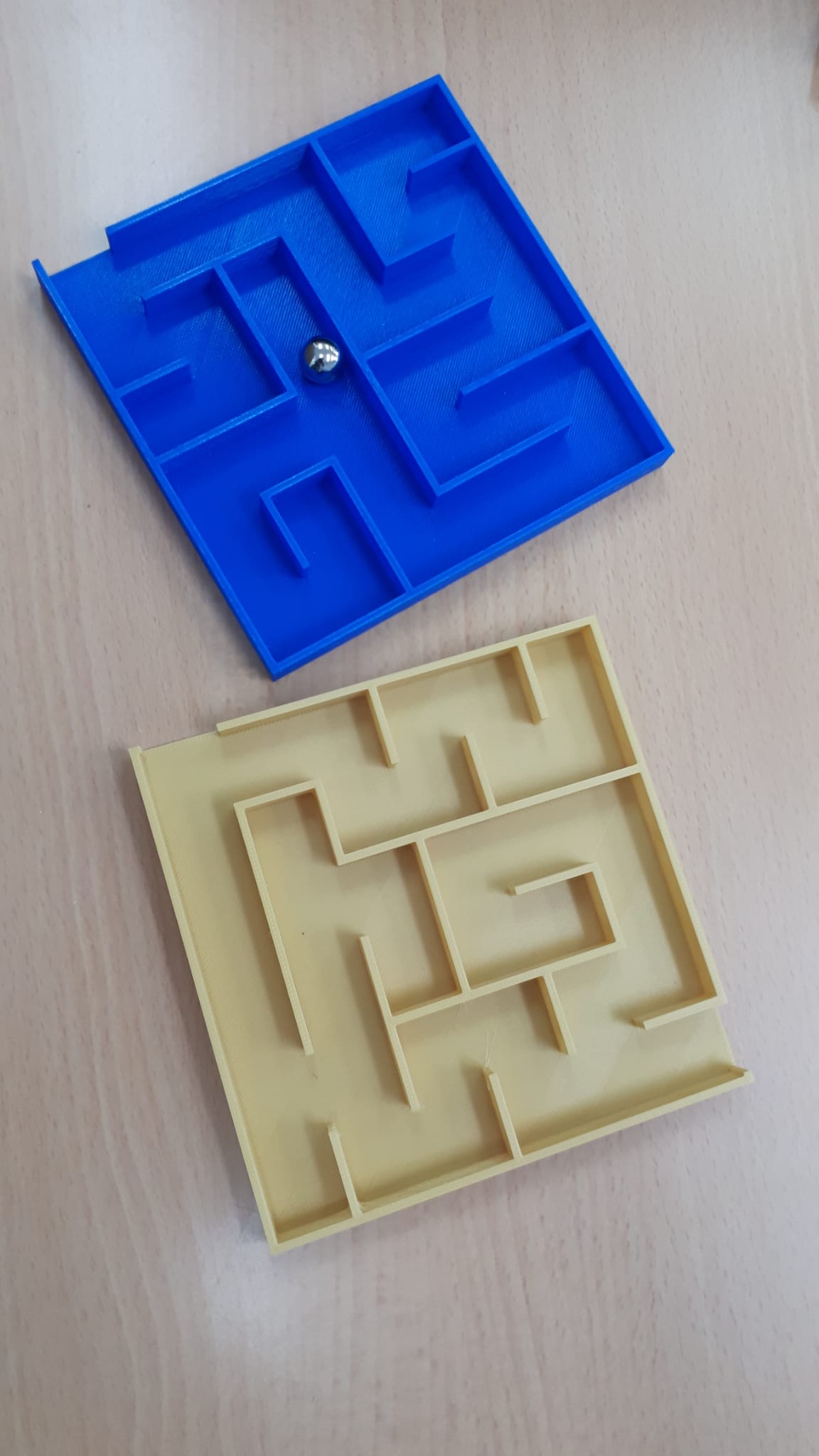
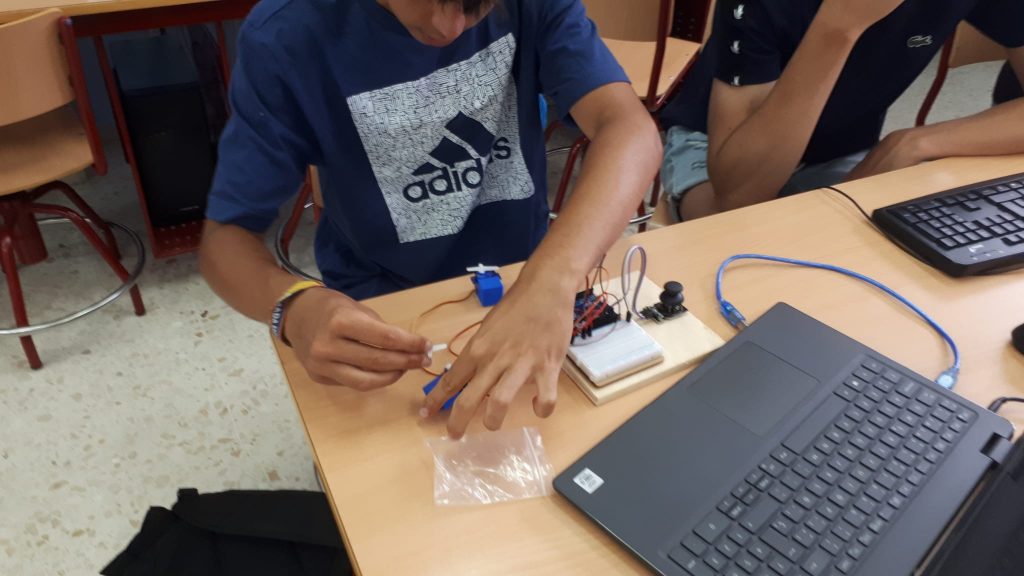

El alumnado de 4° de Robótica ha realizado un laberinto con canica controlado con servomotores SG90, Arduino y joystick . El diseño del laberinto se ha realizado a través de la web «generador de laberintos», luego se ha editado con Inkscape y modificado con Tinkercad. La impresión en 3D se ha realizado con el slicer, Ultimaker Cura.




Comentarios recientes